
Коммуникационные шины PMBus иCAN Bus
Gabriel Lee / Technical Service Engineer
Эффективная связь требует подходящих методов и правильного протокола, этот принцип не только может быть использован для связи с человеком, но также может быть применен для управления системой и мониторинга с несколькими источниками питания. В целом, управление источником питания, включая управление функциями и мониторинг состояния, осуществляется с помощью различных средств, таких как регулировка выходного напряжения (функция, которая позволяет пользователю изменять выходное напряжение источника питания через внешний источник постоянного тока), Статус Дисплей (наиболее распространенный способ - использование светодиодных индикаторов) и сигнал Power Good (который сообщает пользователю или контроллеру, что выходное напряжение источника питания готово) и т.д. Приведенные выше примеры могут соответствовать требованиям подавляющего большинства применений, но они по-прежнему не могут удовлетворить требованиям пользователей, которые хотят одновременно считывать состояние устройства и регулировать рабочие параметры (напряжение / ток). Это связано с тем, что разные стандарты интерфейса имеют свои собственные способы отправки сигналов и проводки, которые могут быть несовместимы с другими. Кроме того, если в систему также включены параллельные источники питания, существует высокая вероятность возникновения проблем неправильного подключения или ошибки отправки сигнала.
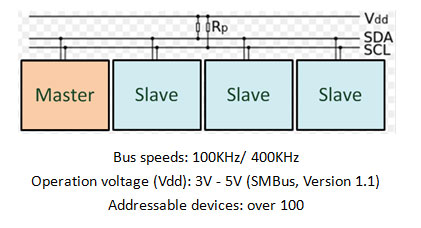
Шина управления питанием (PMBus) использует две двунаправленные линии: последовательную линию передачи данных (SDA) и последовательную линию синхронизации (SCL), что означает, что для связи посредством команд требуется всего три сигнальных провода (включая провод GND), соединенных между устройствами. Например: блок контроллера (ведущий) может общаться с каждым из блоков питания (ведомых) по шине, чтобы обеспечить управление системой и мониторинг с использованием нескольких источников питания. Такой метод может значительно уменьшить громкость управления и сигнальной проводки, что приводит к снижению вероятности отказа схемы, а также в возможности повысить управляемость системы и упростить установку. PMBus был реализован в широком спектре областей, таких как оборудование для промышленной автоматизации и телекоммуникационное оборудование, которые требуют постоянного контроля состояния источников питания.
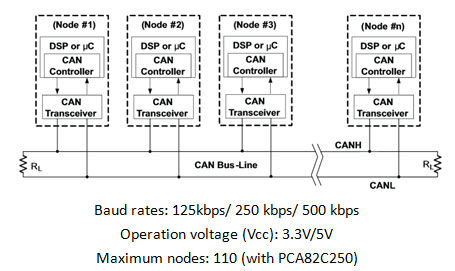
Шина CAN (CAN bus), которая использует метод дифференциальной сигнализации в отличие от PMBus, была разработана для автомобильной промышленности, чтобы заменить сложную проводку двухпроводной шиной (CANH и CANL). Благодаря устойчивости к электрическим помехам и возможности самодиагностики и исправления ошибок данных CAN bus стала популярной во многих отраслях, включая производство и системы автоматизации.
Справочные материалы:
http://blog.yam.com/terse/article/9863377
http://pmbus.org/Assets/PDFS/Public/introduction_to_pmbus.pdf
http://smbus.org/specs/smbus110.pdf
http://www.ti.com/lit/an/sloa101a/sloa101a.pdf
http://www.nxp.com/documents/data_sheet/PCA82C250.pdf