
Introduction to Communication Buses: PMBus and CAN Bus
Gabriel Lee / Technical Service Engineer
Effective communications require appropriate methods and the correct protocol, this principle not only can be used for human communication but also can be adopted to system control and monitoring with multi-power supplies. Generally speaking, management of power supply, including function control and status monitoring, is realized through different means, such as Output Voltage Trimming (a function that allows the user to change the output voltage of a power supply via an external DC source), Status Display (the most common way is by using LED indicators) and Power Good signal (which tells the user or controller that the output voltage of the power supply is ready), etc…. The above examples may be able to meet demands of the vast majority of applications, but it still cannot fulfill a requirement from users who want reading device status and adjusting operating parameters (voltage/current) at the same time. This is because different standards of the interface have their own ways of sending signals and wiring, which could be incompatible with others. In addition, if multi-power supplies in parallel are also involved in the system, there is a high possibility to make problems, wrong wiring or signal sending error.
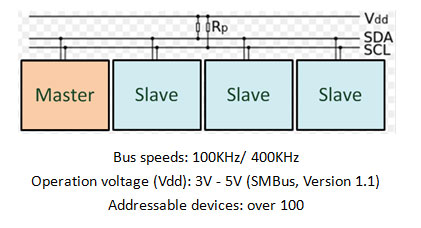
The Power Management Bus (PMBus) uses two bidirectional lines, Serial Data Line (SDA) and Serial Clock Line (SCL), meaning it only needs a total of three signal wires (including a GND wire) connected between devices for communication via commands. For instance: a controller unit (master) can talk to each of the power supplies (slave) over the bus to achieve system control and monitoring with multi-power supplies. Such a method can greatly reduce the volume of control and signal wiring, which results in a lower incidence of circuitry failure, as well as being able to increase system controllability and simplify installation. PMBus has been implemented in a wide range of fields, such as industrial automation equipment and telecommunication equipment, both of which require monitoring status of power supplies constantly due to reliability concerns.
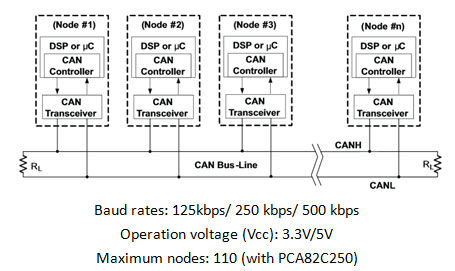
Controller area network (CAN bus), which utilizes the differential signaling method than PMBus, was originally developed for the automotive industry to replace the complex wiring with a two-wire bus (CANH and CANL). Because of the features of high immunity to electrical interference and the ability to self-diagnose and repair data errors, CAN bus has grown to become very popular in a variety of industries including manufacturing and automation systems.
Sources:
http://blog.yam.com/terse/article/9863377
http://pmbus.org/Assets/PDFS/Public/introduction_to_pmbus.pdf
http://smbus.org/specs/smbus110.pdf
http://www.ti.com/lit/an/sloa101a/sloa101a.pdf
http://www.nxp.com/documents/data_sheet/PCA82C250.pdf